 |
| Cliquer ci-dessus |
Travail : A partir de la
vidéo CI-DESSOUS et du descriptif des différentes parties mini robot
répondre aux questions sur libre office .
Les élèves ont la possibilité de voir la vidéo + casque
QUESTIONNAIRE
Q1- Comment est alimenté le robot?
Q2- En sachant le nombre de pile qui sont nécessaire pour alimenter le robot calculer la tension totale appliquée au robot.
Q3-Comment est distribuée l'énergie? Pourquoi utiliser des fils de deux couleurs différentes?
Q3- Qu'est qui convertit sur le robot , l'énergie électrique en énergie mécanique?
Q4-Pourquoi utiliser deux moteurs? Comment est transmis l'énergie de l'axe du moteur vers les roues?
chaîne d'information
Q5-Quel est le nom du logiciel qui me permet de programmer le robot?
Q6-Comment
est transmis le programme du logiciel vers le robot? Sur le robot
comment se nomme le composant qui stocke le programme?
Q7-Quel est le composant sur le robot qui permet de lire le programme et de faire fonctionner les moteurs.
Q8-Quel composant permet au robot de détecter son environnement?
Q9-Compléter le document suivant :Document Réponse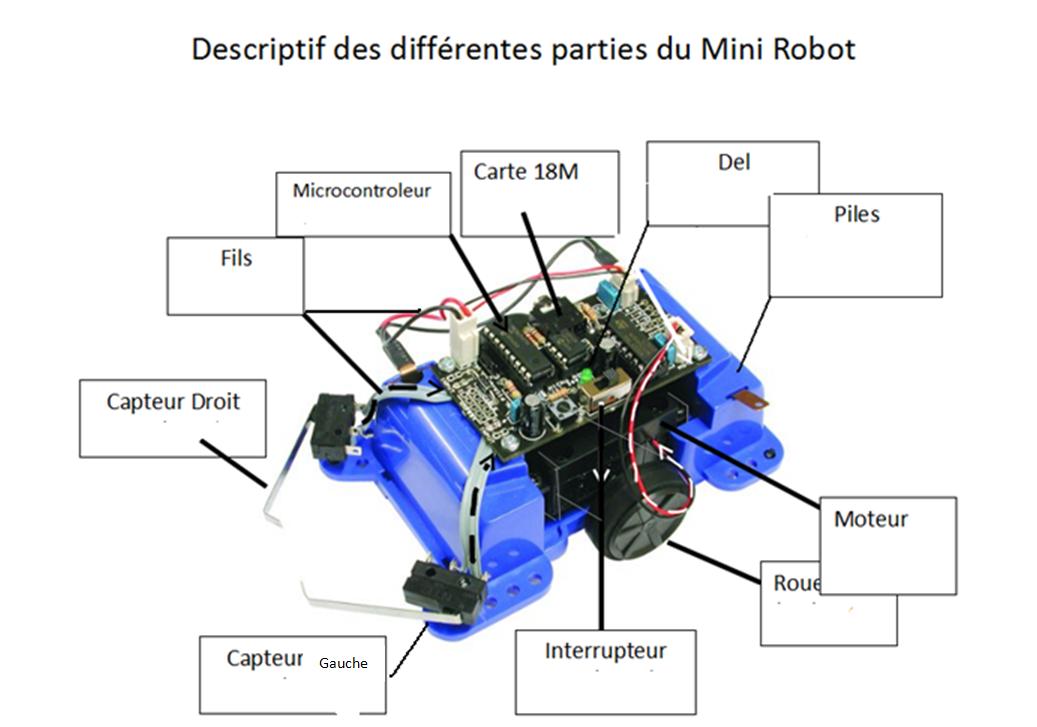
Programme 1
But du programme : se déplacer en avant pendant cinq secondes puis s’arrêter.
Notion de programmation abordée : utilisation des commandes marche avant (forward) et
arrêt (halt), utilisation d’un temps d’attente.
Synoptique :

Commentaire :
Dès la mise sous tension, le programme commence à être exécuté à partir de l’instruction
« start » ; l’instruction « forward » déclenche le déplacement en marche avant et reste active
pendant une durée de 5000 ms (5 s). L’instruction « halt » est alors exécutée et provoque l’arrêt
de MicroRobot.
Faire ce programme avec Programming editor


Programme 2
But du programme : avancer pendant 4 secondes, tourner à gauche, avancer de nouveau
. .
Notion de programmation abordée : utilisation des commandes marche avant (forward) et
gauche (left), utilisation d’un temps d’attente, reboucler un programme de manière
perpétuelle.


Charger et tester ce programme sur le robot